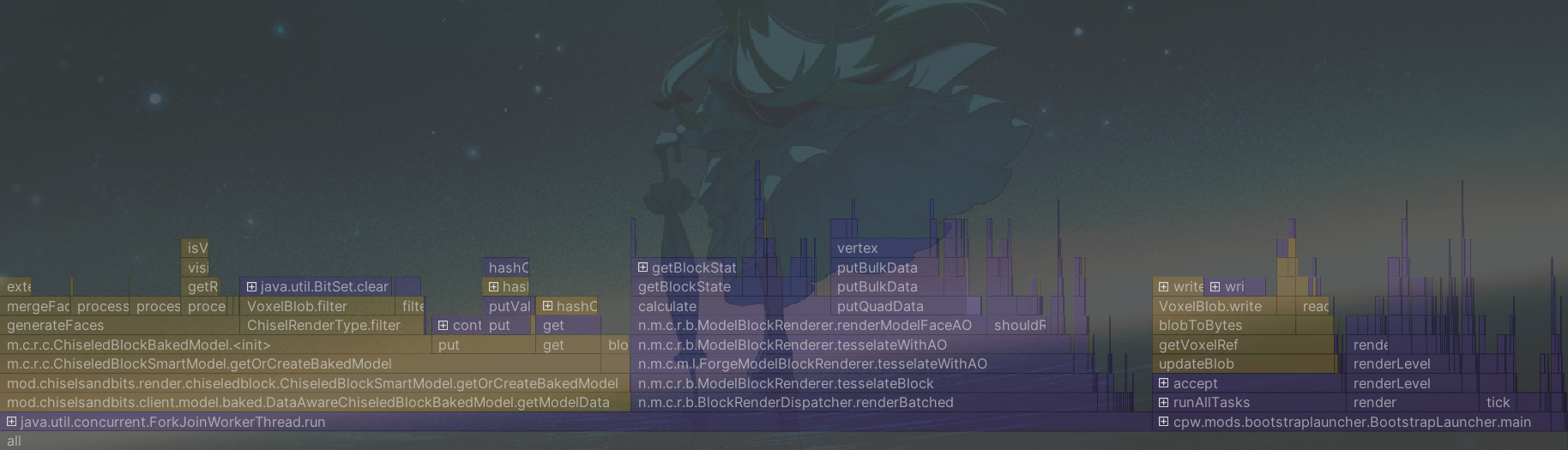
在分析器火焰图中,能看到blobFromBytes方法占据了大量的时间,但是方法中的运算时间又极少,查阅内存分配会发现大量的内存被分配在了新的VoxelBlob实例上。VoxelBlob是用来储存二进制体素数据的类,它需要一个BitSet(4096),也就是16^3来储存数据,吃掉了大量的内存,而这很快引起gc,并消耗CPU时间。
想要优化只能从源头处找到是哪里在新建VoxelBlob实例,在分析器中可以看到游戏在blobFromBytes的底下是renderModelFaceAO,这个方法的作用是渲染带环境光遮蔽的面,看起来无可厚非。
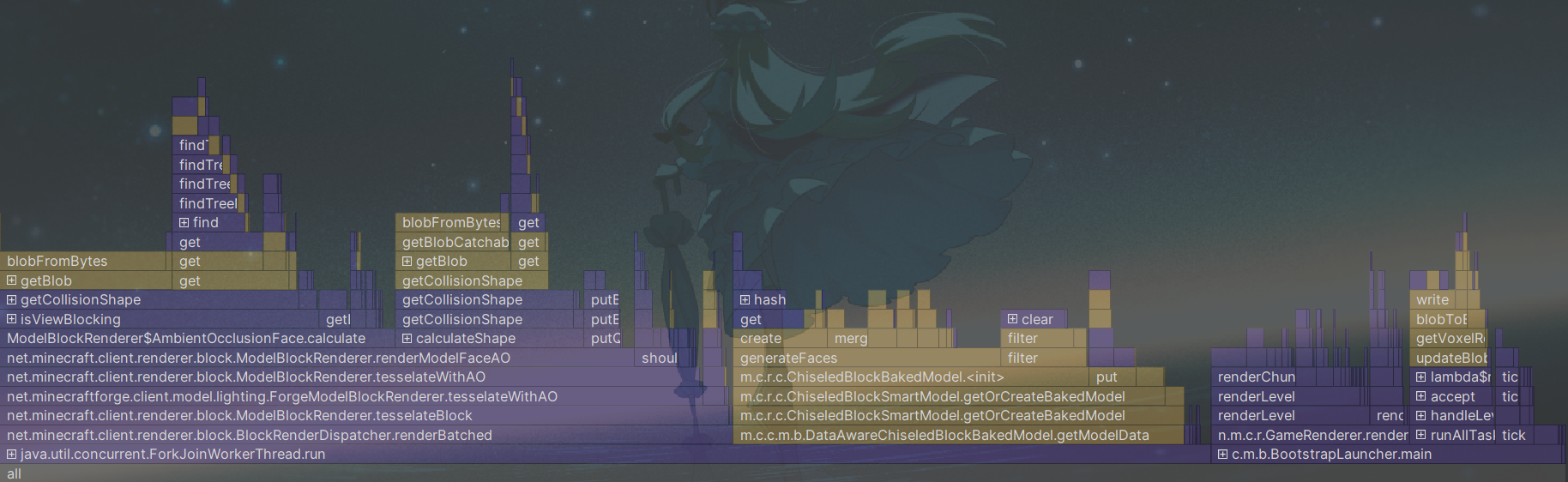
但是仔细观察调用链会发现,怎么在calculateShape的时候,里面的isCollisionShapeFullBlock方法也要新建VoxelBlob对象,判断是否为完整方块为什么要拿到全部的体素数据
1 |
|
isShapeFullBlock是一个静态方法,用来将拿到的方块VoxelShape,也就是方块碰撞箱与预设好的完整方块碰撞箱SHAPE_FULL_BLOCK_CACHE进行比对,来得出这个方块是否为完整方块。这个过程中自然要拿到该雕刻方块的碰撞箱,也就会通过查找该雕刻方块的方块实体对象,然后拿到对应的VoxelBlob,再拿到对应的VoxelShape。
但是这完全没有必要,我只需要在雕刻方块初始化的时候,把是否为完整方块写进blockstate里面,然后让mc直接按着blockstate进行判断不就好了。
但是这套判断方法不能通过覆写Block类的方法修改,只能对isCollisionShapeFullBlock方法进行mixin
1 |
|
先判断是否为雕刻方块,后直接按着blockState进行判断,避免了生成大量VoxelBlob的实例,如果不是,返回原版逻辑进行普通判断
最后,得到了优化后新的火焰图。